Sensor
Estabilidade de leitura
A análise do protótipo permitiu compreender seu comportamento em diferentes condições de umidade do solo, identificar limitações do sensor resistivo, validar a lógica de acionamento da bomba e avaliar melhorias no ciclo de leitura. Os testes foram realizados em solo seco, úmido e saturado, permitindo observar a resposta do sistema, consumo energético, precisão das leituras e estabilidade estrutural do protótipo durante o funcionamento contínuo.
Realizados no Tinkercad, validando leitura do sensor, exibição no LCD e uso da ponte H L298N para acionar a bomba. Foram detectados ruídos no sinal e necessidade de calibrar os limites de acionamento.
Montagem na protoboard, testes em solo seco e úmido e avaliação da instabilidade do sensor resistivo em contato direto com água. Ajustes no tempo de leitura foram realizados.
Testado por 3 horas contínuas com variações manuais de umidade, comprovando estabilidade e proteção dos componentes.
Estabilidade de leitura

Funcionamento contínuo

Autonomia média
Sensor – 75%: o sensor resistivo apresentou grande sensibilidade após contato direto com a água, gerando oscilações bruscas. A solução temporária foi ampliar o intervalo de leitura de 1s para 5s.
Bomba – 90%: funcionamento contínuo estável, sem superaquecimento. A ponte H L298N permitiu acionamento seguro.
Bateria – 40%: as baterias 18650 limitaram o uso de dois LEDs e reduziram a autonomia total do sistema. O LED foi reduzido para apenas um, em modo piscante.
Nos testes, o sistema identificou corretamente as variações de umidade, ligando a bomba somente quando o solo atingia valores abaixo do limite de 30%. O LCD exibiu valores estáveis após ajustes no intervalo de leitura e a caixa de madeira garantiu proteção total dos componentes contra respingos.
O principal ajuste foi a mudança no intervalo de leitura do sensor, que passou de 1s para 5s. Isso reduziu acionamentos indevidos da bomba e estabilizou a leitura resistiva. A lógica da bomba também foi reprogramada para evitar liga/desliga frequentes.
| Condição do Solo | Leitura | Comportamento do Sistema |
|---|
| Solo totalmente seco | Umidade baixa (< 30%) | Bomba acionada imediatamente; LED piscante |
| Solo moderadamente úmido | Entre 30% e 70% | Bomba não acionada; sistema estável |
| Solo saturado | > 90% | Nenhum acionamento; leituras estáveis mesmo com contato com água |
| Operação contínua (3h) | Variável | Funcionamento correto; autonomia limitada |
Fotos e demonstração do sistema em funcionamento.
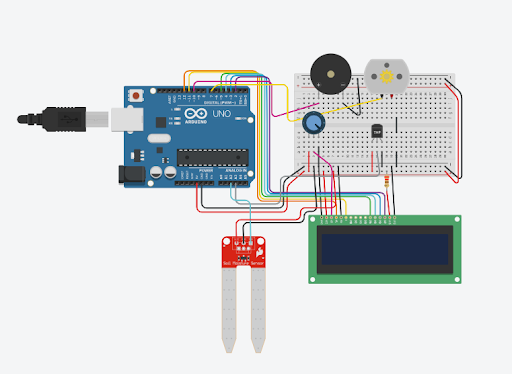
Teste inicial da lógica do código e leitura do sensor.
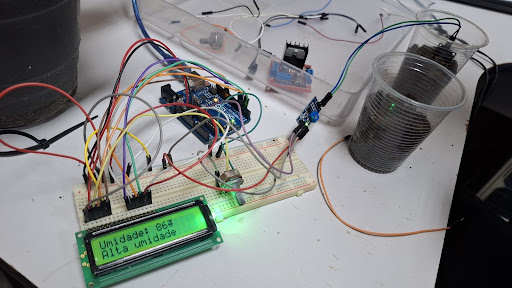
Primeira montagem com ajustes de leitura e conexões.
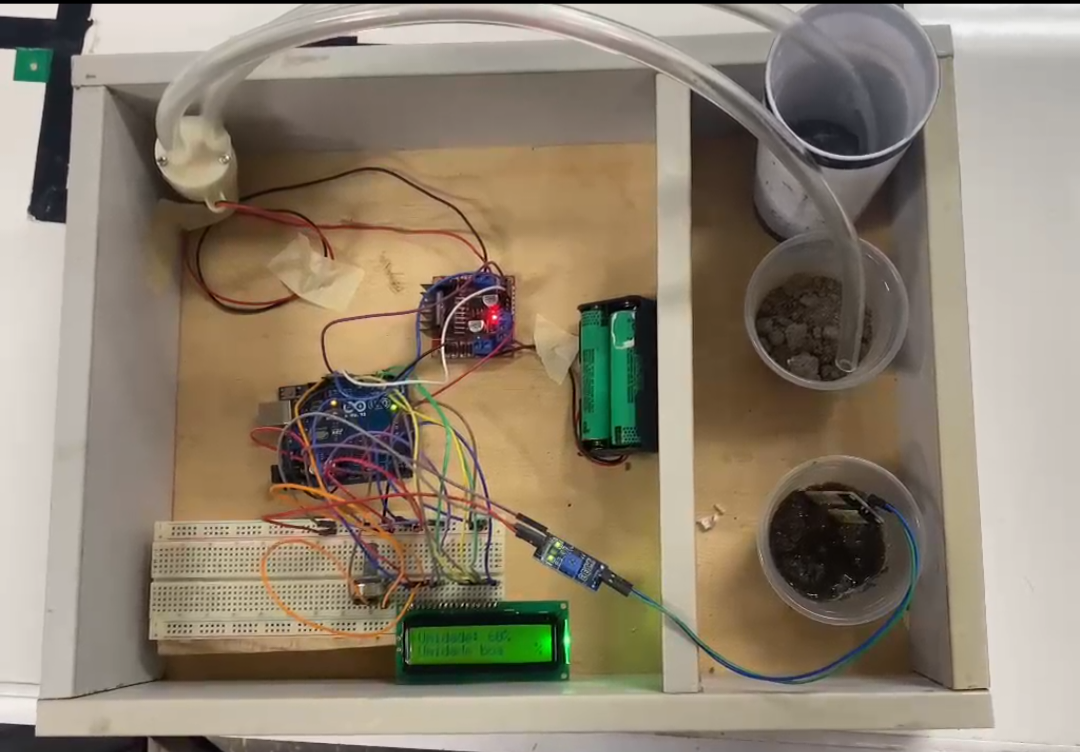
Componentes fixados na caixa de madeira para proteção.
Sistema funcionando com variações de umidade.